HIVE
Intelligent Swarm System
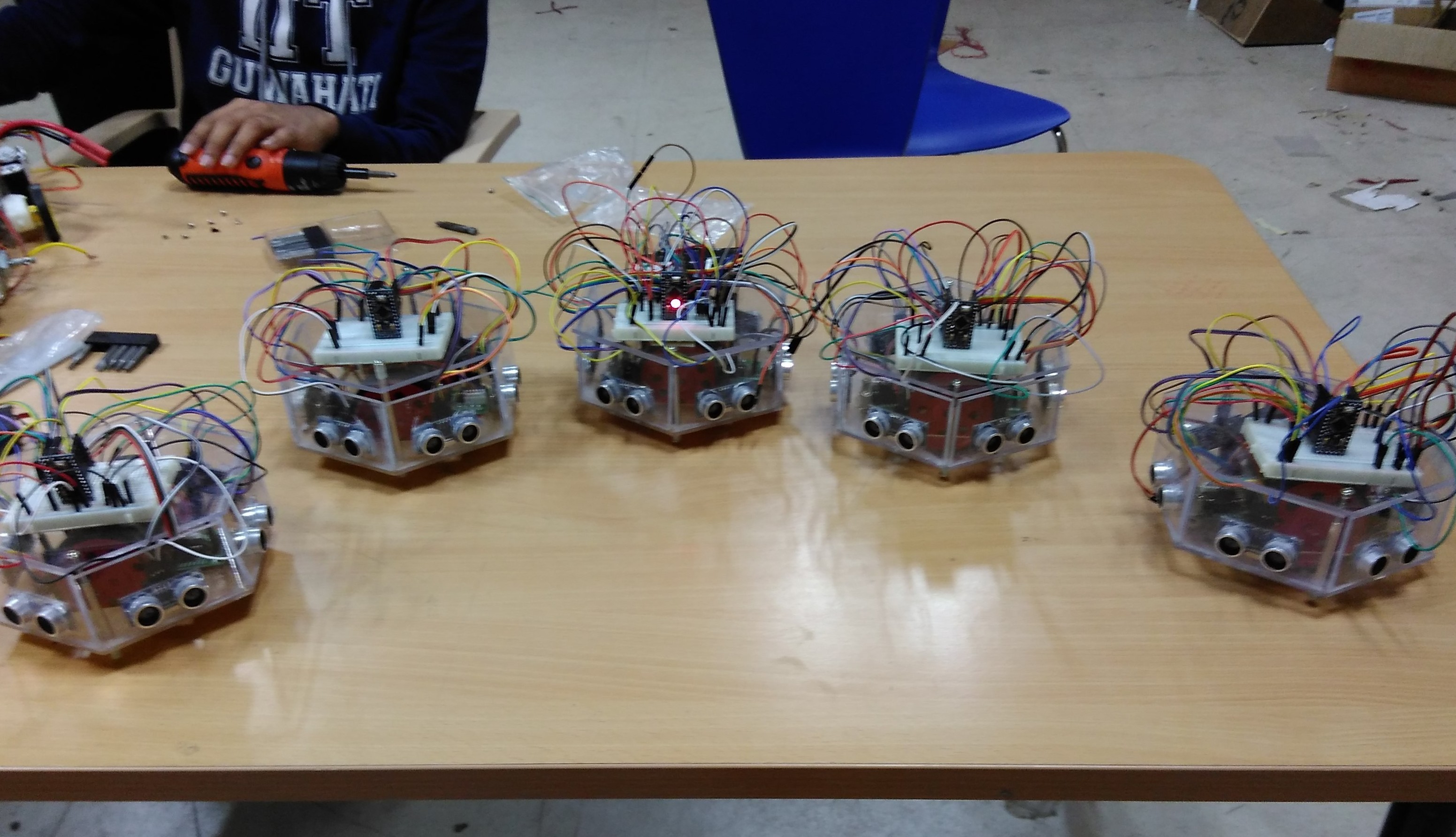
Hive (a name for collection of bees), is a group of autonomous robots designed to perform tasks in a collaborative manner. The robots are designed to search for objects in an indoor environment and assemble at a particular point. The focus of the project is on making a simple yet intelligent system of multiple robots that showcases Swarm Intelligence .
Is it a Swarm system or a multi-robot system ?
As per the definitions coined by Zhong-yang ZHENG in his paper on Swarm Intelligence, Hive can be considered a Swarm system. All the robots in Hive are independent and homogeneous in all senses. There is no Master-Slave correspondence. The software design is robust to the number of robots in the group thus making the system easily extensible.
Algorithms
Collaborative Search
A modified form of Particle Swarm Optimisation algorithm is implemented to search the environment.The robots search their neighbouring environment for a particular type of stimuli and store information for Mapping.
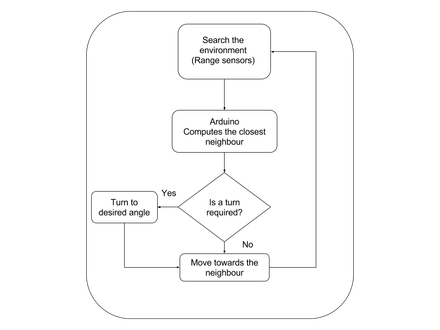
Rendezvous Algorithm
A custom designed rendezvous algorithm is used for successful aggregation of robots. The range sensors search for other objects in a local area around the robot. The robot then moves towards the closest object found. The decision is updated continuously which helps the robot in differentiating between a fellow bot and a passive object.
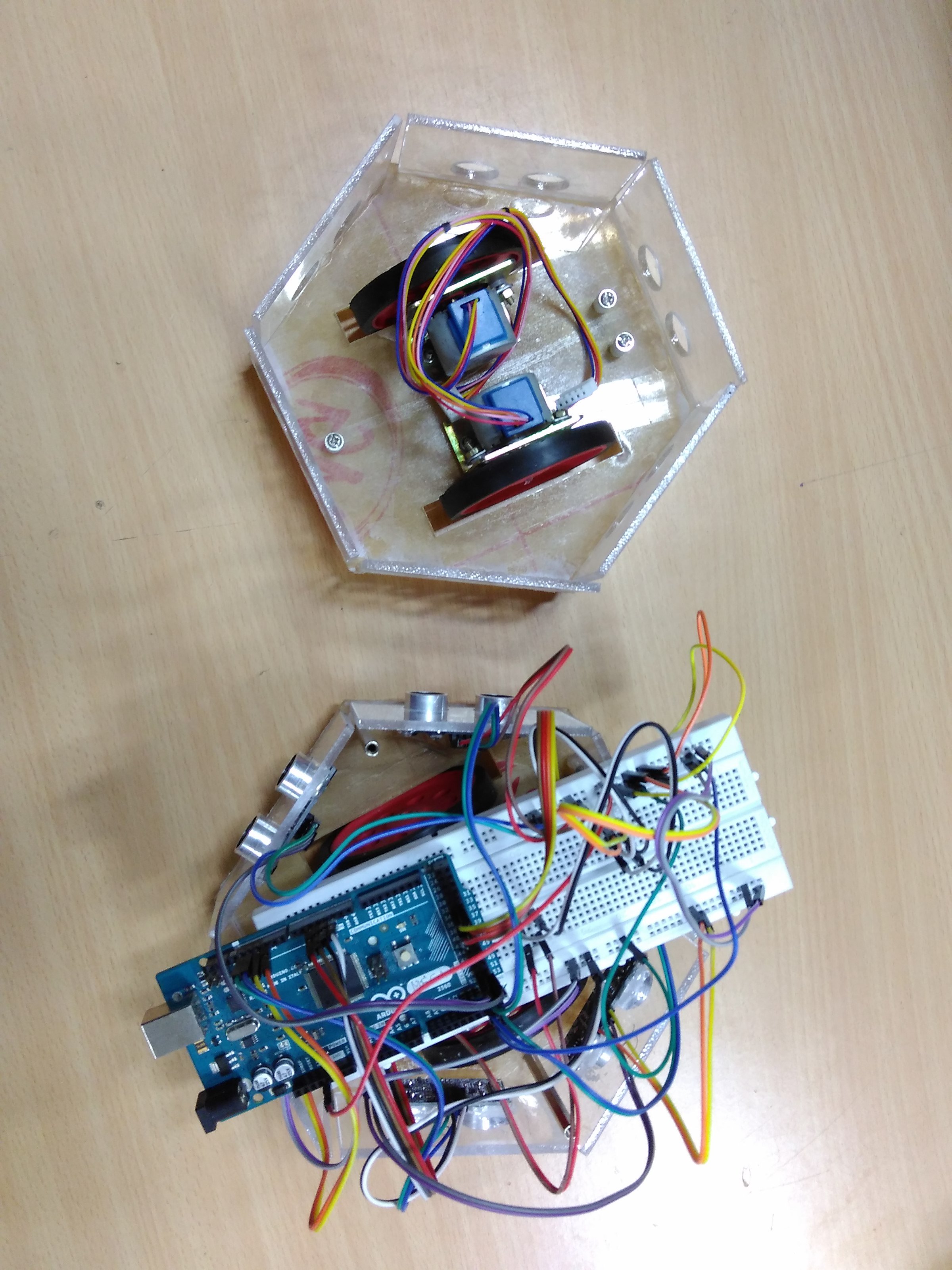
Design
Each robot consists of:
- 2x Stepper DC motors
- 6x Ultrasonic range sensors
- 2x Motor driver modules